|
基于虚拟仿真技术的异形桶罐封口机构的设计研究
邹振健
摘要:金属包装容器由于具有优良的阻隔性能和力学性能,表面装饰性好,废弃处理方便等优点,已经广泛应用在食品包装中,特别在罐头生产中,大量地使用金属容器作为包装物。但金属容器的密封性是金属容器包装的重要一环,使用三维虚拟仿真技术进行设计,具有相对简单和明了的特点,文中以鱼罐头椭圆罐封罐机构的设计为例进行了研究,取得了满意的效果。
关键词:异形桶罐;封口;UG
引言
金属包装容器由于具有优良的阻隔性能和力学性能,表面装饰性好,废弃处理方便等优点,已经广泛应用在食品包装中,特别在罐头生产中,大量地使用金属容器作为包装物。金属容器的密封性是金属容器包装的重要一环,特别是非圆金属容器(又称异形罐)的封罐的形式一直是食品企业关注的问题之一。在一些罐头产品中,如豆豉鲮鱼一类的罐头,使用了大量的异形罐,如椭圆罐等,异性罐作为包装物使罐头产品的包装更为美观,更易吸引消费者。金属容器的密封,一般采用卷边封口的形式加以密封,卷边封口使金属罐体与金属罐盖的周边牢固,紧密钩合而形成五层卷边。但由于异形罐的形状不规则,封罐机的封罐机构较圆形罐复杂,给机构的设计带来了麻烦。为此,根据鱼罐头椭圆罐封罐机的生产现状,对异形罐封罐机构进行了基于三维仿真技术的设计研究,以求一种比较简单可行的异形罐封罐机构设计方法。
1 工作原理
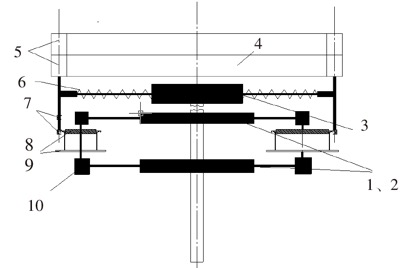
图1 新型异形罐封罐机构
1、2、3-转盘;4-凸轮;5-滚轮;6-弹簧;7-封边滚轮;
8-行星轮机构;9-压盖、压罐板;10-周转轮系
如图1所示,异形罐封罐机构的部件主要由头道封罐凸轮导轨、二道封罐凸轮导轨、头道卷边滚轮、二道卷边滚轮、弹簧、齿轮周转轮系、压罐机构、转盘等组成,其工作原理为:异形罐在进入封罐机构封罐以前,先要通过排盖机构把异形盖放在异形罐的罐体上,然后再进入封罐机。当传送带把异形罐及其异形盖送到指定的位置后(压罐板上),转盘1向下移动,使压盖板压紧异形盖,使罐体在压盖板与压罐板的作用下相对固定,同时在周转轮系的作用下自传,罐体也随着同轴转盘1、2、3做周转运动,同轴转盘转一圈后,异形罐的罐体自身也自转约大于两圈,异形罐罐身在自转的过程中,封(卷)边滚轮依靠弹簧的拉力始终与其接触,并在拉力的作用下进行封罐卷边,当转盘旋转过180°后,罐体自转一圈,头道滚轮完成卷边;随后进入二道卷边,二道滚轮在凸轮导轨的引导下下降进入二道卷边,然后完成二次卷边。卷边完成后,凸轮控制滚轮使卷边滚轮移开,封罐好的异形罐进入下道工序。二道滚边原理和效果和头道滚边相同,在此不加累述。
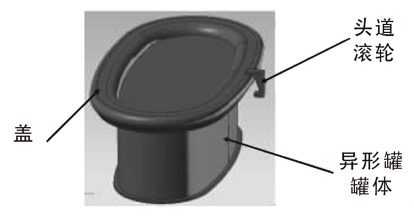
图2 头道滚轮滚边前示意图

图3 头道滚边后效果图
2 设计计算
金属异形罐封罐机构除了机构运动方案的设计之外,还包括凸轮的设计、弹簧的设计、齿轮系的设计等。整个设计过程还进行了大量现场试验,以便在设计的过程中对参数进行修正。
凸轮机构是金属异形罐封罐机构的重要零件,本研究对凸轮机构的设计采用三维软件进行仿真设计。该凸轮包括两条导轨,即头道滚轮导轨和二道滚轮导轨(圆柱凸轮槽),当头道滚轮完成滚边以后,就使滚轮移开罐体并随着凸轮的运动上升,同时二道滚轮下降到预定位置准备二道滚边。由于头道滚轮和二道滚轮的交换有一个过程,故设计时整个转盘转一圈,罐体自转要大于2圈。UG(unigraphics软件)是一款集CAD/CAE/CAM于一体的强大的三维软件,目前基于UG的机构设计主要的两种方法是参数法设计和编程法设计,本机构的凸轮采用参数法进行设计,设计过程如下。
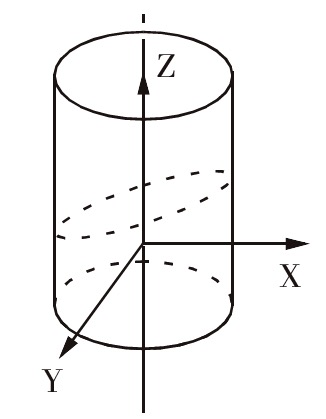
图4 圆柱轨迹及其坐标图
坐标的建立如图4 所示,且X轴过轨迹的最低点。各种参数如下:
①圆柱半径R;
②基圆柱半径Rb;
③从动件滚轮的厚度b;
④滚子半径r;
⑤从动件的运动规律S(φ),其中φ为凸轮的转角。
由图4,建立图示圆柱上的曲线方程:

从动件是一个滚子,(1)是滚子中心线的方程,现在要建立实际轮廓线。滚子的实际轮廓线为滚轮的切线,由高等数学知识可知,实际轮廓线的方程为滚子轮廓的圆曲线方程的导数。滚子轮廓圆曲线的方程为:

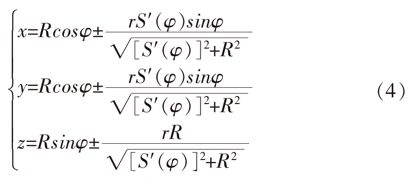
实际轮廓线方程为:

x、y、z 为理论廓线上的坐标;xa、ya、za为滚子圆和实际廓线上的公共点坐标,也是滚子圆实际廓线上的切点坐标。由于实际廓线也位于圆柱面上,所以满足下式:

联立以上3式,可得到在半径为R时的实际廓线的方程:
在得出了实际的轮廓曲线后,就可以利用UG6.0中的“工具”-“表达式” 建立相关的曲线方程,然后用UG中的“规律曲线”绘制出这些曲线,在绘制曲线前,先建立圆柱面,实际曲线绘制完成后,就在两条实际轮廓线之间建立一深度为b的槽。根据参数法设计的图形可以随时进行更改设计。
弹簧的设计主要是涉及到弹簧的长度,弹簧的弹性系数。弹簧的长度要根据罐形来选择,当封罐机更换罐形的时候,根据需要更新弹簧长度。弹簧系数要结合工况确定。异形罐的罐体材料,厚度确定后计算出其刚度,确定塑性变形所需的力,根据该力的大小来确定弹簧的参数。通过试验检测,要对马口铁异形罐卷边所需的力为9N左右。
F=kx (5)
弹簧在封罐过程中变化范围由异形罐的罐形可计算出:
△x=(145.2-71)/2=37.1mm (6)
k的取值要考虑到封罐过程由于罐形变化引起的作用力变化,还要考虑初始力的大小,综合以上因素,根据现场试验取k=50N/m。且弹簧封罐过程中最小伸长量18cm。由于要实现转盘与罐体的传动比,可以采用行星轮系,且n2/n1=1/2.1。行星轮设计过程如下:给整个行星轮系加一个公共的角速度-ωH,即行星架固定。

为了防止根切,齿数z要大于17,故可取z2=42,z1=20。之所以取i=2.1,因为在异形罐进入封罐机构和出封罐机构都有一定缓冲过程,以及头道滚轮和二道滚轮的的切换需要时间。
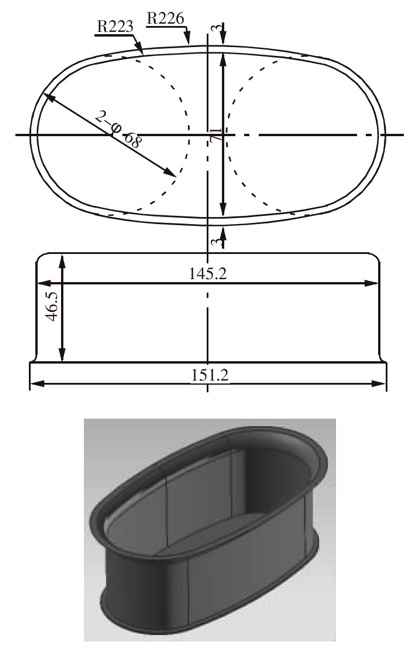
图5 异形罐罐体
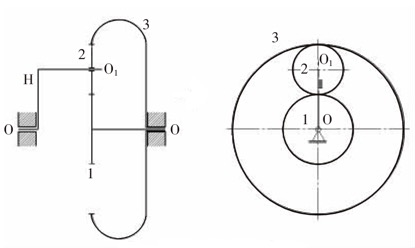
图6 行星轮系示意图
3 结束语
使用三维软件对异形罐封罐机的封罐机构进行仿真设计,设计相对简易实用,经实验可以满足对金属异形罐的封罐要求,进行仿真设计后的封罐机构进行封罐实验,具有如下优点。
(1)生产率高,可以达到20000罐/h,有利于工艺条件的改变与控制。
(2)便于连续生产和实现自动控制,提高劳动生产率,改善劳动条件。
(3) 机构调节性好。
|

