|
钢桶危险货物包装跌落试验机的设计
戴凤卿 王金良 刘青 王春鸣 张峰
天津陆海石油设备系统工程有限责任公司
摘要:跌落试验机是一种验证产品耐受冲击跌落性能的设备,目前该种试验机的工作模式可分成两大类;托架式和悬吊式。但由于试验机的设计限制和试样的形状、大小及悬吊时的状态各异,导致对试样的重量具有一定的局限性,对跌落高度的测量既不便还可能存在安全隐患。该项研究引入了可编程序控制器、计算机、力传感器和位移传感器测量技术,通过试件重量在提升(下降)与砧面分离(接触)过程中重量和位移的实时测试数据,经软件分析系统智能判断跌落高度的起始点,精确实现跌落高度的识别和定位。解决了以往跌落试验机用于各种运输包装件(如:集装袋类、桶类和箱类等)跌落高度测量和跌落高度置位问题。
关键词:大型危险品包装件 跌落试验机 PLC 触摸屏
0 引言
跌落试验是使用最普遍的一项验证包装在流通过程中耐冲击性能的重要测试手段,而跌落试验机的性能和方式决定了试验的准确性和方便性,目前,300公斤以下的跌落试验设备已有专用的、定型的产品设备。但是,测试大重量(300公斤以上)的危险货物包装跌落试验设备还是空白。另外,现有的用于300公斤以上的跌落试验只有悬挂试验样品的释放装置,没有完整的设备,而且使用过程中对于跌落高度的需人工测量,操作不方便,并且存在不安全因素。
利用目前先进的计算机技术和测控技术,研制的大型危险货物运输包装跌落试验机已完成对包装试验样品重量在100Kg至2吨的运输包装件的吊挂/跌落,并实验跌落高度的自动测量和跌落高度的自动置位,避免了测量跌落高度时对人体可能造成的意外伤害;试验方式的多样化,也是这次试验机设计的亮点之一。本设计不仅满足了我国国内和出口危险货物包装检测的需求,更是填补了大型危险货物包装件跌落测试设备的产品空白。
1、系统的硬件设计
大型危险货物包装跌落试验机的主体部分就是提升框架结构,该部分是跌落试验机安全、稳定、精确运行的必要保证。主体框架采用龙门式结构,释放装置安装在活动横梁上,由两部伺服控制电机提供动力,控制、提升活动横梁,两侧安装滑动式导向装置使提升装置平稳运行,从机械结构方面保证跌落试验机的安全性、平稳性和控制的精确性。
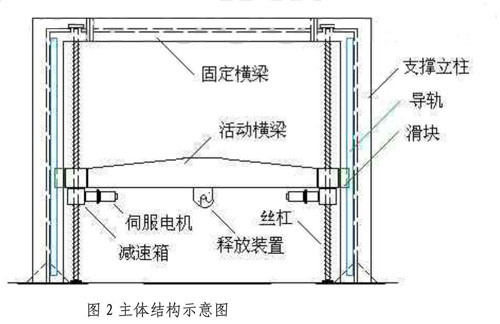
大型危险货物包装跌落试验机的支撑立柱和固定横梁均采用工字钢为原料,保证设备整体的安全性与稳定性。支撑立柱和固定横梁用螺栓连接,方便设备加工完成后的运输和安装。考虑大重量试件需要有一定的宽度和高度要求,特试验机净跨度≥3米,固定横梁与砧面的距离≥3.8米。
●滑动式导向装置由导轨和滑块组成,导轨固定于工字钢支撑柱内侧,滑块与活动横梁连接,保证活动横梁平稳运行。
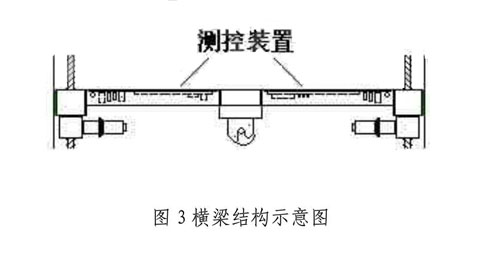
●活动横梁设计为知形槽状结构(如图3所示),测控部分安装于槽状横梁中。这是因为伺服电机、伺服控制器、释放装置等连线较多的测量及控制组件都在活动横梁上,将包括PLC在内的测量控制部分安装于活动横梁的凹槽内可减少外部连线,使结构更加紧凑。
2)释放装置
大型危险货物包装跌落试验机能否正确、准确的完成跌落试验,释放装置是最为关键的部分。(如图4所示)。
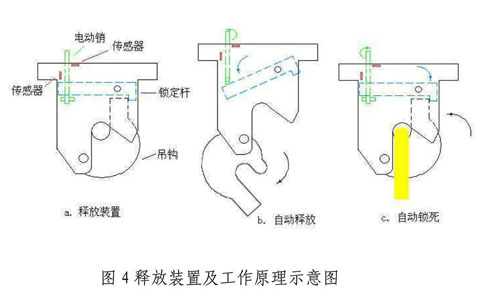
释放装置主要由外壳、吊钩、锁定杆、电动销、传感器等部分组成。释放时旋转电动销,锁定杆解锁,吊钩旋转释放。需吊装试件时,将试件吊环套于吊钩上,用手托起吊钩推到位后,锁定装置自动锁定。通过传感器测量电动销和锁定杆位置,测控系统自动完成释放、锁定和复位动作。
2 PLC控制系统
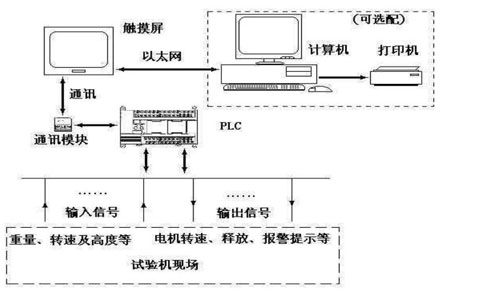
大型危险货物跌落试验机主要是控制活动横梁的运动,带动试件在垂直方向的移动。伺服控制器控制电机的转动带动活动横梁的整体运动。而在试验中的称重传感器和光纤传感器分别是零点置位和释放装置锁定的重要部分。整个测控系统的示意图如下:
2.1 软件设计
整个设备的软件控制主要是采用逻辑控制器,伺服控制器,传感器和触摸屏共同完成。通过触摸屏发送操作指令,逻辑控制器控制伺服电机和伺服控制器,并配合传感器来实现整个试验的完成。整个跌落试验机的控制是个闭环系统。
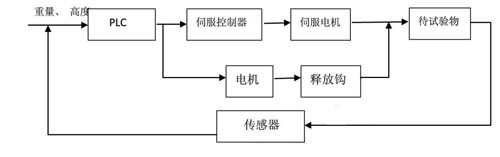
控制系统的主要控制对象是待测物体,对待测物的高度和重量进行控制,系统的被控对象为电机的速度和正反转,执行机构为伺服控制器,所有控制相对比较复杂。
在整个程序设计中充分利用PLC编程时允许使用子程序的便利,采用结构化的编程思想,将不同的提升方式,待测物体的校零,释放钩的控制,手自动的切换等分别编制子程序。整个循环就是一个动作的序列,只要依次执行每个动作就可以完成自动所需要的动作。具体每个操作动作则靠调用相应的子程序完成,避免程序机械重复的问题。主程序框图如下图所示:
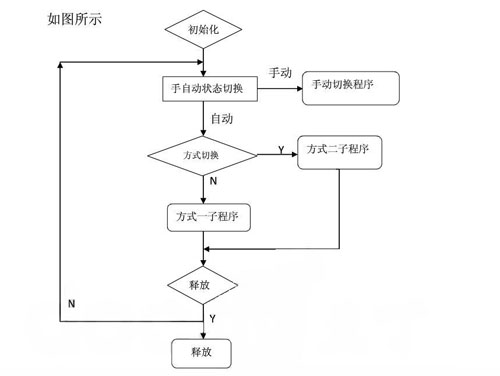
从图中可以看到此项目设计了一下的子程序,见如下(表一)
| 子程序 |
程序实现功能 |
初始化
手动切换
方式一
方式二
释放 |
参数初始化工作,包括高度和重量初始化,手自动状态初始化。
在手动状态下的几种操作控制的切换,其中包括:上升、下降、校零、回零等状态。
在自动状态下,试件从减重的角度来判断零点,并自动上升到预置的高度。
在自动状态下,试件从增重的角度来判断零点,并自动上升到预置的高度。
锁定杆自动脱落,吊钩释放重物。 |
2.2 试验机的关键技术
大型危险货物跌落试验机的研制在总结了以往试验机优点的同时,也增加了一些新的控制和技术,主要不同是:
●试验高度的自动测定
以往此种跌落方式跌落试验的试验高度由人工测量。对于桶状容器的角跌落试验和焊接跌落试验时,需事先测量高度并摆好跌落的状态,试验时跌落既不方便,又不安全。该项目研制的大型危险货物包装跌落试验机既可实现试验高度的自动识别与预置,又解决了跌落状态的预置问题。
●释放装置
以往的跌落试验装置主要是采用托板支承试件,如旋翼式、翻板式等跌落试验机。 此种类型的中东为什么不适用于300Kg以上的试验样品的跌落试验,对试验样品的重量有一定局限性。大型危险货物包装跌落试验机采用悬吊式钩型释放装置,解决了大型、较重试验样品的跌落试验问题。利用光传感器控制和电机驱动释放,实现了对试验样品的自动锁定和在操作人员的指令下自动释放的功能。
●测量精确性
以往的跌落试验设备只适用于试件重量一般在300Kg以内,不适用于一些大型的危险货物试验。大型危险货物包装跌落试验机采用门型框架结构,两端分别使用伺服电机驱动,在螺旋丝杠和导轨的作用下,保证活动横梁水平运动。试验重量达到2吨以上,试验机中的力传感器、导轨和丝杠确保了试验中高度测量精确性。
●先进的控制系统
该包装跌落试验机的控制系统采用可编程序控制器和平板式电脑。将工业控制初次引入到该试验机中,通过传感器和PLC的智能控制,实现了试件提升过程的自动判断零位及自动提升到预置高度。采用平板式电脑提高了试验机的可靠操作性和实用性。
3 触摸屏监视软件的开发
3.1 总体设计
该控制系统监控软件采用昆仑纵横的15?触摸屏将用于现场控制的PLC控制系统和上位机监控系统连接起来。其次,从变量定义和I/O设备的管理入手,利用组态软件多样化的绘图工具,强大的脚步语言处理能力和丰富的命令语言函数开发出生动,友好的主监控界面,以及含盖报警系统,参数设置,运行控制等功能齐全的子监控界面。
经过开发的监控系统实时现场执行结构的操作模拟和监控,实时报警的查询和处理等功能。其中针对操作中的释放功能采用了多次提示确认的方式,以防非操作者的错误操作,以保证安全,监控软件的总体设计框图如所示:
3.2 试验监控界面设计
作为整个监控软件的主要部分,运行界面的设计形象地反映了整个系统试验的过程,并且可以根据操作人员的动作,实时反应出各个状态和参数值。操作人员不仅可以在手动和自动中相互切换,并可以根据试验的要求选择试验的操作模式。在试验中,可以方便的预置试验的提升高度,针对可能造成操作危险的软件操作,监控界面采用多次确认的方式来提高了试验的安全性。运行界面如图所示:
3.3参数设置和报警界面设计
为了方便实现系统的自动化,提高试验机的使用范围,在监控界面特增加了参数的设置,通过改变电机转速改变试件上升和下降的速度,对于不同的试件通过改变系数的设置,扩大了试验机的使用对象,节省了资金,提高了试验的精度。
同时,按照设计的设计要求,试验机上升的最高高度是3.8米,最大 载重量是2.5吨,硬件的故障等问题,在试验中超过了上述的指标,要求监控系统能够做出及时、有效的报警。鉴于此在开发报警系统时,该设计首先建立了系统的报警注释,在操作界面中可以及时、准确的获得报警的详细信息。从而帮助操作人员更好的解决问题。
4 结语
大型危险货物包装跌落试验机的设计,将工业控制技术引进到了包装行业,不仅改善了以往试验机的准确性和便利性,而是在很大程度上对包装行业的测试有了更高的改进。
参考文献
[1]包装箱跌落试验机设计 作者: 凌立功、赵叔锦《机床与液压》1999-4国内统一刊号:CN44-1259/TH
[2]大负荷的跌落试验和冲击台 作者:于治会《仪器仪表与分析监测》1999-2 ISSN:1002-3720
[3]包装件的跌落试验和冲击试验装置的最新进展 作者:刘雪娇《中国机械工程学会包装和食品机械学会第一届年会论文集》1989年 分类号:TS206
(文章来源:上海包装1996年第2期)
|

